
![]()
![]()
![]()
HOME > 建築技術ミニコラム"天地" > すべり試験機O-Y・PSMの開発
設計・建築技術ミニコラム
すべり試験機O-Y・PSMの開発
2019年02月20日 横山 裕(東工大教授)先回は、妥当な性能試験方法確立するためには、評価対象のモノが使われているときに「実際に受ける負荷を適切にシミュレートする」必要があることを説明しました。例えば、歩行時に感じるすべりを評価するためには、歩行時における床と靴底の接触状況をシミュレートした測定装置が必要ということです。しかし、歩行中に刻々と変化する接触状況をシミュレートするのは、そう容易いことではありません。今でこそ、人間と同じような動きをするロボットなども開発されていますが、一般に装置が複雑になると、簡便さが失われたり、測定結果の安定性が低下したりするものです。実用性が失われない範囲でいかに適切にシミュレートするか、この問題を解決した1つの具体例として、故、小野英哲博士が開発したすべり試験機"O-Y・PSM(ONO-YOSHIOKA Pull Slip Meter)"を紹介します。
はじめに、この試験機の骨子を図を用いて説明します。図に示すように、この装置では、歩行者がつぎの一歩に踏み出す時の接触状況をシミュレートしています。靴底の前半部を切り取ったものを"すべり片台座"に張り付けて"すべり片"とします。このすべり片を床の上に置き、重錘の重量を掛けたうえで、斜め上18°の方向に引っ張った時の荷重Pを測定します。この18°という角度が、歩行時の接触状況をシミュレートするという観点からいかに重要かは、図を見れば一目瞭然のことと思います。
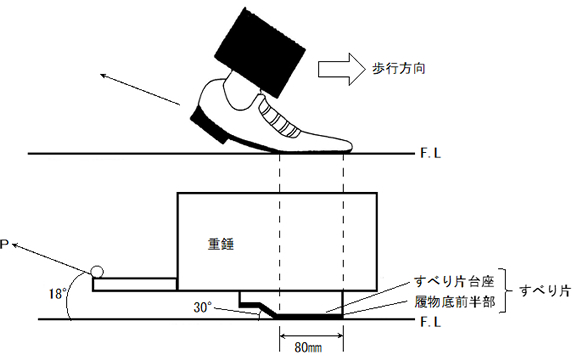 図 すべり試験機O-Y・PSMの骨子
図 すべり試験機O-Y・PSMの骨子
その他にも、
・すべり片に掛ける重錘の重さ(重錘重量)
・すべり片の床と接する面の大きさ(接触面積)
・すべり片を引っ張る速さ(引張荷重速度)
・すべり片を床上に置いてから引っ張り始めるまでの時間(前置時間)
が、測定結果に影響します。実際の歩行時には、荷重や接触面積などは刻々と変化しますが、それらをそのままシミュレートすると、前述のように実用性が低下してしまいます。この試験機では、荷重や接触面積の測定結果などを参考に、実際の歩行時の範囲を包含するよう、重錘重量は4水準、接触面積は3水準、引張荷重速度は3水準、前置時間は3水準の実験条件を設定しました。そして、4×3×3×3=計108通りの組み合わせで実験をしました。その結果、重錘重量は80kgf、接触面積は7×8=56cm2、引張荷重速度は80kgf/s(1秒間に0kgfから80kgfまで荷重が増える速さで引っ張る)、前置時間は0s(床の上に置いたらすぐに引っ張り始める)とすると、人間が感じるすべりとよい対応を示す測定結果が得られることを突き止めました。このような基礎実験を経て完成したすべり試験機O-Y・PSMを、写真に示します。
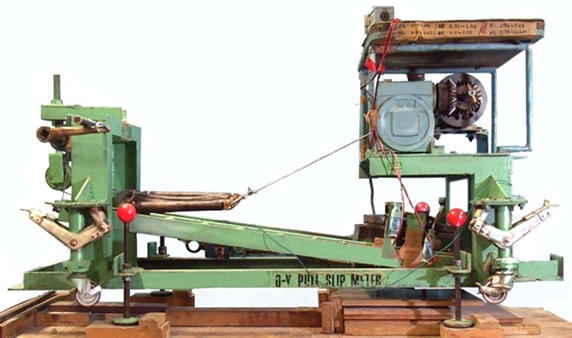 写真 すべり試験機O-Y・PSM(ONO-YOSHIOKA Pull Slip Meter)
写真 すべり試験機O-Y・PSM(ONO-YOSHIOKA Pull Slip Meter)

